



 该研究指出,迫切需要制定适用于开放式建筑工地机器人的安全指南(图片由人工智能通过 Ideogram 生成)。
该研究指出,迫切需要制定适用于开放式建筑工地机器人的安全指南(图片由人工智能通过 Ideogram 生成)。如果建筑机器人无法准确检测到工地上的人类工人,那么了解它们在不造成伤害的情况下可以撞击人类工人多大的力度就显得尤为重要。
这是一项新研究的起点,该研究旨在提高人类工人的安全,因为机器人和协作机器人在建筑工地上越来越常见,它们可以执行各种任务,包括砌砖、铺路、安装石膏板和拆除。
这项美国研究是由美国国家职业安全与健康研究所 (NIOSH) 安全研究部、美国石溪大学土木工程系和 PILZ 自动化安全公司的研究人员进行的。
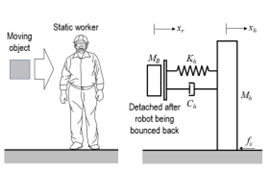 静止工人与移动机器人侧面碰撞的机械模型。(来源:《人机协作施工现场施工机器人的安全操作》)
静止工人与移动机器人侧面碰撞的机械模型。(来源:《人机协作施工现场施工机器人的安全操作》)报告警告称,机器人和协作机器人有可能因意外接触而伤害工人,因此需要按照特定的安全程序操作,以防止造成伤害。
研究人员指出,现代机器人拥有可以帮助它们检测人类对手的工具,包括计算机视觉设备,这些设备可以感知周围工人的移动,并让机器人找出如何避开他们的方法。
但他们补充说,这些技术目前还没有很好地应用于建筑活动,因为建筑环境结构性较差,操作任务也比较复杂。
他们说:“像建筑工地这样的开放式工作场所通常不是机器人拥有所有必要传感器来检测工人动作和环境变化的理想环境。”
“环境干扰、噪音以及传感器数量不足会极大地影响机器人检测施工空间内周围危险和现有物体移动的能力。”
建筑工地难以对工人进行持续跟踪
这意味着,虽然机器人能够检测到工人的存在,但它们可能无法在开放式工地上从各个方向持续监控工人。如果它们无法识别工人的动作,那就意味着机器人不太可能根据工人的身体姿势执行所有必要的安全操作。
因此,如果不能指望机器人在建筑工地上避开工人,就需要采取不同的方法。研究人员表示,这涉及到“调节人类工人与机器人之间,或机器人搬运的建筑材料之间的能量传递”——换句话说,就是要弄清楚机器人碰撞人类的力度极限是多少,才能避免造成人员伤害。
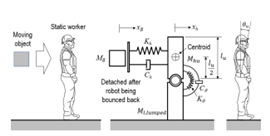 静止工人与移动机器人之间背部碰撞的机械模型。(来源:《人机协作施工现场施工机器人的安全操作》)
静止工人与移动机器人之间背部碰撞的机械模型。(来源:《人机协作施工现场施工机器人的安全操作》)该研究考虑了机器人搬运砖块与工人发生意外碰撞的两种情况:第一种情况是工人被撞击并被强行推离原来的位置(“被撞击和推”);第二种情况是机器人从后面接触工人,工人的上半身向前弯曲,而下半身保持不动(“被撞击和弯曲”)。
研究人员开发了一系列复杂的数学方程式,以模拟在每种情况下,男性人类建筑工作与机器人设备在干燥建筑工地上的影响。
模拟结果表明,在“撞击和弯曲”场景中,机器人的有效载荷需要以较慢的速度移动,以避免比“撞击和推动”场景中更大的接触力。
研究发现,如果砌砖机器人携带 17 公斤重的砖块,其最大速度应小于每秒 700 毫米;如果携带 25 公斤重的砖块,其最大速度应小于每秒 570 毫米。
研究发现,如果以该速度飞行,那么造成伤害的可能性就可以“得到充分预防”。
需要安全准则
报告总结道:“这种方法可以为在建筑工地安全操作机器人提供参考值。未来可以开发针对不同场景和不同操作环境(例如雨天和泥泞地面)的动态模型。”
这些参考值可用于指导未来的安全标准制定。目前,虽然制造业协作机器人和移动机器人的安全标准已经制定,但建筑业尚未制定此类标准。
该研究指出:“如果安全法规没有明确规定具体的操作,现有机器人搬运的工件在开放环境中作业时可能会击中人类工人。”
“建筑行业迫切需要制定在露天建筑工地使用机器人设备的安全指南。”
美国国家职业安全与健康研究所(NIOSH)的论文于今年早些时候在法国里尔举行的第41届国际建筑自动化与机器人技术研讨会(ISARC)上发表。点击此处阅读全文。
保持联系


通过我们世界领先的杂志、新闻简报和每日简报,随时获取您所需的信息。


