


Quanto duramente si dovrebbe consentire ai robot edili di colpire i lavoratori umani?

25 novembre 2024
 Lo studio afferma che c'è un bisogno "urgente" di linee guida di sicurezza per i robot nei cantieri aperti (immagine generata con intelligenza artificiale tramite Ideogram)
Lo studio afferma che c'è un bisogno "urgente" di linee guida di sicurezza per i robot nei cantieri aperti (immagine generata con intelligenza artificiale tramite Ideogram)Se i robot edili non sono in grado di rilevare con sufficiente precisione la presenza dei loro colleghi umani in un cantiere, allora è importante sapere con quale forza possono urtarli senza causare danni.
Questo è stato il punto di partenza di un nuovo studio che mira a migliorare la sicurezza dei lavoratori umani, poiché robot e co-bot stanno diventando sempre più comuni nei cantieri edili per ogni genere di attività, tra cui la posa di mattoni, la pavimentazione stradale, l'installazione di cartongesso e la demolizione.
Lo studio statunitense è stato condotto dai ricercatori della Divisione di ricerca sulla sicurezza del National Institute for Occupational Safety and Health (NIOSH), Dipartimento di ingegneria civile della Stony Brook University, USA, e da PILZ Automation Safety.
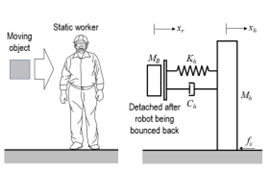 Modello meccanico dell'impatto laterale tra il lavoratore statico e il robot in movimento. (Fonte: Operazioni sicure di robot da costruzione su cantieri collaborativi uomo-robot)
Modello meccanico dell'impatto laterale tra il lavoratore statico e il robot in movimento. (Fonte: Operazioni sicure di robot da costruzione su cantieri collaborativi uomo-robot)L'organizzazione ha avvertito che i robot e i co-bot possono ferire i lavoratori tramite un contatto imprevisto e che pertanto devono essere utilizzati seguendo specifiche procedure di sicurezza per evitare danni.
I ricercatori hanno osservato che i robot moderni dispongono di strumenti che li aiutano a rilevare le loro controparti umane, tra cui dispositivi di visione artificiale in grado di percepire i movimenti dei lavoratori intorno a loro e di consentire loro di capire come evitarli.
Hanno però aggiunto che queste tecnologie non sono attualmente ben adattate alle attività di costruzione, dove gli ambienti sono meno strutturati e le attività di manipolazione sono complesse.
"Un cantiere aperto come un cantiere edile spesso non è l'ambiente ideale per i robot, che devono avere tutti i sensori necessari per rilevare i movimenti dei lavoratori e i cambiamenti ambientali", hanno affermato.
“Disturbi ambientali, rumori e un numero insufficiente di sensori possono influenzare notevolmente la capacità del robot di rilevare i pericoli circostanti e i movimenti degli oggetti esistenti nello spazio di costruzione.”
I cantieri edili rendono difficile il monitoraggio continuo dei lavoratori
Ciò significa che, mentre i robot possono essere in grado di rilevare la presenza dei lavoratori, potrebbero non essere in grado di monitorarli costantemente da tutte le direzioni in un cantiere aperto. E se non riescono a riconoscere i movimenti del lavoratore, ciò significa che è meno probabile che il robot possa eseguire tutte le operazioni di sicurezza richieste in base alla postura del corpo del lavoratore.
Quindi, se non si può contare sul fatto che i robot evitino i lavoratori in un contesto di costruzione, allora è necessario un approccio diverso. I ricercatori hanno affermato che ciò comporta "regolare il trasferimento di energia tra il lavoratore umano e il robot, o il materiale da costruzione trasportato dal robot", in altre parole, calcolare quanto forte i robot possono urtare gli umani senza causare loro lesioni.
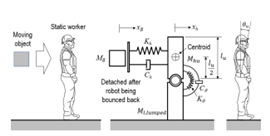 Modello meccanico dell'impatto posteriore tra il lavoratore statico e il robot in movimento. (Fonte: Operazioni sicure di robot da costruzione su cantieri collaborativi uomo-robot)
Modello meccanico dell'impatto posteriore tra il lavoratore statico e il robot in movimento. (Fonte: Operazioni sicure di robot da costruzione su cantieri collaborativi uomo-robot)Lo studio ha preso in considerazione due casi di robot che trasportavano blocchi di muratura e che hanno avuto un impatto inaspettato sui lavoratori: il primo in cui il lavoratore è stato colpito e spinto con forza lontano dalla sua posizione originale ("colpito e spinto") e il secondo in cui il robot ha colpito il lavoratore da dietro e la parte superiore del suo corpo si è piegata in avanti all'altezza della vita, mentre la parte inferiore del corpo è rimasta immobile ("colpito e piegato").
I ricercatori hanno sviluppato una serie di complesse equazioni matematiche per modellare gli impatti tra un lavoro di costruzione eseguito da un essere umano di sesso maschile e dispositivi robotici in un cantiere edile asciutto in ogni scenario.
I risultati simulati hanno mostrato che il carico utile del robot avrebbe dovuto muoversi a velocità inferiori nello scenario "colpito e piegato" per evitare una forza di contatto maggiore rispetto al caso di "colpito e spinto".
Lo studio ha scoperto che la velocità massima di un robot per muratura dovrebbe essere inferiore a 700 millimetri al secondo se il robot trasporta un blocco da 17 chilogrammi e 570 millimetri al secondo se trasporta un blocco da 25 chilogrammi.
Se si viaggia a quella velocità, si è scoperto che il rischio di lesioni può essere "adeguatamente prevenuto".
Sono necessarie linee guida di sicurezza
Ha concluso, "Questo approccio può fornire valori di riferimento per far funzionare in sicurezza i robot nei cantieri edili. In futuro, potrebbero essere sviluppati modelli dinamici per diversi scenari e diversi ambienti operativi, come tempo piovoso e terreno fangoso".
Tali valori di riferimento potrebbero essere utilizzati per informare i futuri standard di sicurezza. Attualmente, mentre sono stati prodotti standard di sicurezza per robot collaborativi e mobili nell'industria manifatturiera, non sono ancora stati sviluppati standard del genere nell'edilizia.
"Se le norme di sicurezza non dettano chiaramente un'operazione specifica, i pezzi trasportati dai robot esistenti potrebbero colpire i lavoratori umani mentre operano in un ambiente aperto", afferma lo studio.
“Il settore edile ha urgente bisogno di linee guida di sicurezza per l’uso di attrezzature robotiche nei cantieri aperti”.
Il paper del NIOSH è stato presentato al 41° International Symposium on Automation and Robotics in Construction (ISARC) a Lille, Francia, all'inizio di quest'anno. Per leggere il paper completo, clicca qui.
RESTA CONNESSO



Ricevi le informazioni di cui hai bisogno, quando ne hai bisogno, attraverso le nostre riviste, newsletter e briefing quotidiani leader a livello mondiale.


CONNETTITI CON IL TEAM



