


Automatisch von KI übersetzt, Original lesen
Wie stark dürfen Bauroboter menschliche Arbeiter schlagen?

25 November 2024
 Laut Studie besteht ein „dringender“ Bedarf an Sicherheitsrichtlinien für Roboter auf offenen Baustellen (Bild generiert mit KI über Ideogram)
Laut Studie besteht ein „dringender“ Bedarf an Sicherheitsrichtlinien für Roboter auf offenen Baustellen (Bild generiert mit KI über Ideogram)Wenn Bauroboter ihre menschlichen Gegenstücke auf einer Baustelle nicht genau genug erkennen können, ist es wichtig zu wissen, mit welcher Kraft sie mit ihnen zusammenstoßen können, ohne Schaden zu verursachen.
Dies war der Ausgangspunkt für eine neue Studie mit dem Ziel, die Sicherheit menschlicher Arbeiter zu verbessern, da Roboter und Cobots auf Baustellen immer häufiger für alle möglichen Aufgaben eingesetzt werden, darunter Maurerarbeiten, Straßenbau, Trockenbau und Abbrucharbeiten.
Die US-Studie wurde von Forschern der Division of Safety Research am National Institute for Occupational Safety and Health (NIOSH), Department of Civil Engineering, Stony Brook University, USA, und PILZ Automation Safety durchgeführt.
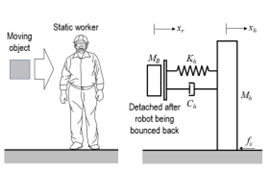 Mechanisches Modell des Seitenaufpralls zwischen dem statischen Arbeiter und dem sich bewegenden Roboter. (Quelle: Sicherer Betrieb von Baurobotern auf Mensch-Roboter-Kooperationsbaustellen)
Mechanisches Modell des Seitenaufpralls zwischen dem statischen Arbeiter und dem sich bewegenden Roboter. (Quelle: Sicherer Betrieb von Baurobotern auf Mensch-Roboter-Kooperationsbaustellen)Darin wurde gewarnt, dass Roboter und Cobots das Potenzial haben, Arbeitnehmer durch unerwarteten Kontakt zu verletzen, und dass bei ihrem Betrieb daher besondere Sicherheitsverfahren eingehalten werden müssen, um Schäden zu vermeiden.
Die Forscher stellten fest, dass moderne Roboter über Werkzeuge verfügen, die ihnen dabei helfen können, ihre menschlichen Gegenstücke zu erkennen. Dazu zählen Computer-Vision-Geräte, die die Bewegungen der Arbeiter um sie herum wahrnehmen und es ihnen ermöglichen, ihnen auszuweichen.
Sie fügten jedoch hinzu, dass die Technologien derzeit nicht gut für Bautätigkeiten geeignet seien, da die Umgebungen weniger strukturiert und die Manipulationsaufgaben komplex seien.
„Eine offene Baustelle wie etwa eine Baustelle ist für Roboter oft keine ideale Umgebung, da sie über alle notwendigen Sensoren verfügen, um die Bewegungen der Arbeiter und Umgebungsveränderungen zu erkennen“, sagten sie.
„Umweltstörungen, Geräusche und eine unzureichende Anzahl von Sensoren können die Fähigkeit des Roboters, Gefahren in der Umgebung und Bewegungen vorhandener Objekte im Bauraum zu erkennen, stark beeinträchtigen.“
Baustellen erschweren die ständige Überwachung der Arbeiter
Das bedeutet, dass Roboter zwar die Anwesenheit von Arbeitern erkennen können, diese aber auf einer offenen Baustelle möglicherweise nicht kontinuierlich aus allen Richtungen überwachen können. Und wenn sie die Bewegungen des Arbeiters nicht erkennen können, ist es weniger wahrscheinlich, dass der Roboter alle erforderlichen Sicherheitsmaßnahmen basierend auf der Körperhaltung des Arbeiters durchführen kann.
Wenn man sich also nicht darauf verlassen kann, dass Roboter Arbeitern auf Baustellen ausweichen, ist ein anderer Ansatz erforderlich. Die Forscher sagten, dass es dabei darum gehe, „die Energieübertragung zwischen dem menschlichen Arbeiter und dem Roboter oder dem vom Roboter getragenen Baumaterial zu regulieren“ – mit anderen Worten, herauszufinden, wie stark Roboter gegen Menschen stoßen können, ohne sie zu verletzen.
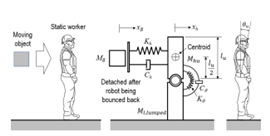 Mechanisches Modell des Rückstoßes zwischen dem statischen Arbeiter und dem sich bewegenden Roboter. (Quelle: Sicherer Betrieb von Baurobotern auf Mensch-Roboter-Kooperationsbaustellen)
Mechanisches Modell des Rückstoßes zwischen dem statischen Arbeiter und dem sich bewegenden Roboter. (Quelle: Sicherer Betrieb von Baurobotern auf Mensch-Roboter-Kooperationsbaustellen)In der Studie wurden zwei Fälle untersucht, in denen Roboter, die Mauersteine trugen, unerwartet auf Arbeiter trafen: Im ersten Fall wurde der Arbeiter geschlagen und gewaltsam aus seiner ursprünglichen Position weggestoßen („geschlagen und gestoßen“). Im zweiten Fall berührte der Roboter den Arbeiter von hinten und sein Oberkörper beugte sich nach vorne um die Taille, während sein Unterkörper unbewegt blieb („geschlagen und gebeugt“).
Die Forscher entwickelten eine Reihe komplizierter mathematischer Gleichungen, um die Auswirkungen zwischen menschlicher Bauarbeit und Robotergeräten auf einer Trockenbaustelle in jedem Szenario zu modellieren.
Die simulierten Ergebnisse zeigten, dass sich die Nutzlast des Roboters im Szenario „Schlagen und Biegen“ langsamer bewegen müsste, als im Szenario „Schlagen und Stoßen“, um eine größere Kontaktkraft zu vermeiden.
Die Studie ergab, dass die Maximalgeschwindigkeit eines Mauerroboters weniger als 700 Millimeter pro Sekunde betragen sollte, wenn der Roboter einen 17 Kilogramm schweren Block trägt, und 570 Millimeter pro Sekunde, wenn er einen 25 Kilogramm schweren Block trägt.
Bei einer solchen Geschwindigkeit könne eine mögliche Verletzung „ausreichend verhindert werden“, heißt es in dem Urteil.
Sicherheitsrichtlinien erforderlich
Das Fazit lautete: „Dieser Ansatz kann Referenzwerte für den sicheren Einsatz von Robotern auf Baustellen liefern. In Zukunft könnten dynamische Modelle für verschiedene Szenarien und unterschiedliche Einsatzumgebungen entwickelt werden, wie etwa Regenwetter und schlammiger Boden.“
Diese Referenzwerte könnten als Grundlage für zukünftige Sicherheitsstandards dienen. Während es derzeit in der Fertigungsindustrie Sicherheitsnormen für kollaborative und mobile Roboter gibt, sind im Baugewerbe noch keine derartigen Standards entwickelt worden.
„Wenn die Sicherheitsvorschriften einen bestimmten Vorgang nicht klar vorschreiben, könnten von vorhandenen Robotern getragene Werkstücke menschliche Arbeiter treffen, während sie in einer offenen Umgebung arbeiten“, heißt es in der Studie.
„Die Baubranche braucht dringend Sicherheitsrichtlinien für den Einsatz von Robotergeräten auf offenen Baustellen.“
Der Beitrag des NIOSH wurde Anfang des Jahres auf dem 41. Internationalen Symposium für Automatisierung und Robotik im Bauwesen (ISARC) in Lille, Frankreich, vorgestellt. Um den vollständigen Beitrag zu lesen, klicken Sie hier.
Bleiben Sie verbunden



Erhalten Sie die Informationen, die Sie brauchen, genau dann, wenn Sie sie benötigen – durch unsere weltweit führenden Magazine, Newsletter und täglichen Briefings.
Mit dem Team verbinden



